건국대학교 스마트운행체공학과 박훈철 교수가 장수풍뎅이의 비행 원리를 재현한 초소형 비행 로봇을 개발했다.
건국대 박훈철 교수와 로잔 공대 다리오 플로리아노(Dario Floreano)는 장수풍뎅이의 비행 중 날개의 펼침과 접힘 과정을 관찰하고 원리를 밝히고, 이를 공학적으로 모사해 장수풍뎅이를 모방한 비행 로봇 ‘쿠비틀’에 적용했다.
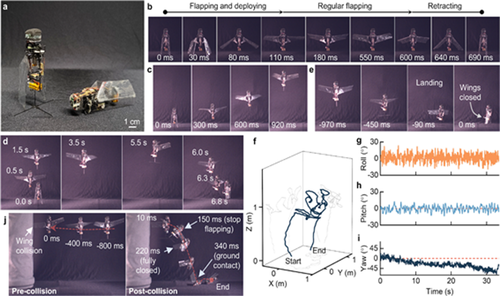
장수풍뎅이의 비행 원리는 지상에서 활동 시 뒷날개를 접어서 앞날개 아래에 넣어 보관하다가 비행 직전에는 앞날개를 완전히 펼치는 반면, 뒷날개는 바깥 부분이 접힌 채로 노출된다. 이어서 접힌 뒷날개는 몇 차례의 날갯짓으로 뒷날개를 완전히 펼쳐 비행한다. 하강 시에는 짧은 시간에 날갯짓 각도와 속도를 줄이면서 하강하고, 날개의 원심력이 줄어 날개의 상승각과 펼침각이 감소하면서 지상으로 내려온다.
연구팀은 ‘장수풍뎅이 날개의 펼침-접힘’ 원리를 활용해 ‘쿠비틀’에 지지대, 날개 막, 경첩 관절, 탄성 힘줄로 구성된 날개를 부착했다. 몸통과 날개는 힌지로 연결해 날개가 접히게 하고, 적절한 탄성을 갖는 와이어로 날개 뿌리와 힌지를 연결했다.
그 결과, 아래쪽으로 접혀진 날개는 초기 날갯짓의 원심력으로 상승해 일정한 날갯짓 평면을 이루며 로봇의 무게인 18g보다 큰 양력을 발생해 로봇이 비행할 수 있음을 밝혀냈다. 또한, ‘쿠비틀’은 날개가 외부 물체와 충돌하는 경우, 날갯짓을 멈추고 날개를 접으면서 착륙해 날개의 파손도 방지한다.
박 교수는 “대기 밀도가 낮은 지구와 우주상의 극한 환경에서도 로봇이 비행할 수 있도록 후속 연구를 진행하고 있다.”고 말했다.
관련기사
- 아태지역 제조 82%, 디지털 전환 시 기술 통합에 어려움 겪어
- 휴머노이드 로봇 시장, 2030년까지 매년 ‘83%’ 성장
- 유블럭스 ‘고정밀 위치추적 솔루션’, 엔비디아 ‘자율주행 개발 플랫폼’ 지원 강화
- 엔비디아, 휴머노이드 로봇 개발 가속화 지원
- 이든티앤에스-정원엔시스, ‘AI 업무 자동화 솔루션’ 사업 협력
- ‘엔비디아 AI 파운드리’, 쉽고 빠른 기업 맞춤형 생성AI 모델 구축
- ETRI, IoT·스마트시티 국제표준 주도권 확보
- 유니버설 로봇, 협동로봇 공인인증 센터 설립
- 에이오팜, 모든 농산물에 활용되는 ‘투명 AI 선별기’ 출시
- 산업부, ‘AI 자율제조 선도 프로젝트’ 본격 가동
- 소형 자동화 물류 창고에 최적화된 로봇...효율성·유연성↑