자율주행 순찰로봇은 보안, 안전관리, 시설 점검 등 다양한 산업에서 활용되고 있다. 하지만 대부분의 로봇 제어 소프트웨어는 복잡한 프로그래밍이 필요해 전문 기술자가 아니면 운용하기 어려운 문제가 있었다.
이러한 기술 장벽은 로봇 도입을 주저하게 만드는 요인이며, 특히 보안 및 시설 관리 인력들이 쉽게 운용할 수 있는 솔루션이 요구되었다. 이에 따라 직관적인 UI/UX를 갖춘 노코드 기반의 로봇 제어 소프트웨어가 필요성이 대두되었다.
프로그램 지식없어도 쉽게 로봇 제어하는 노코드 기반 SW
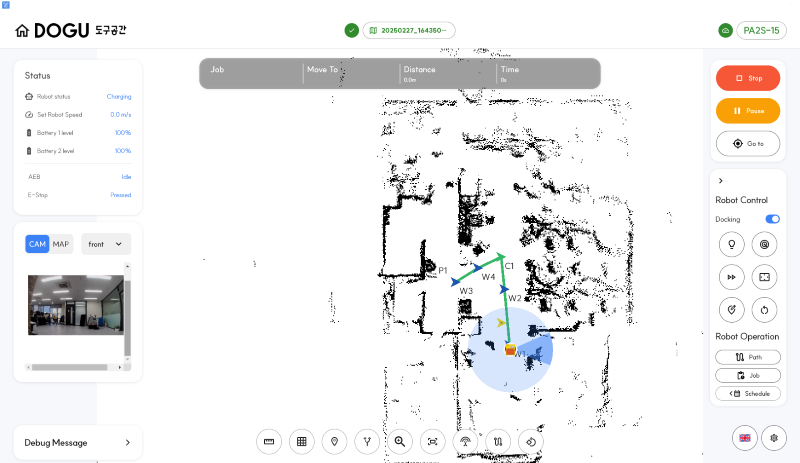
도구공간이 출시한 ‘플래너 V4’는 사용자가 프로그래밍 지식 없이도 쉽게 로봇을 제어할 수 있도록 설계된 소프트웨어다. 이 소프트웨어는 ▲순찰 현장 맵핑 ▲순찰 일정 관리 ▲미션 할당 ▲자율주행 시나리오 편집 ▲로봇 원격 조정 등 다양한 기능을 제공한다. 특히, 드래그 앤 드롭 방식을 지원하여 사용자가 쉽게 주행 경로를 설정하고 수정할 수 있다. 이러한 기능은 로봇 운용의 접근성을 크게 높여, 기업뿐만 아니라 소규모 시설에서도 효과적으로 활용할 수 있도록 돕는다.
‘플래너 V4’는 기존 사용자들의 피드백을 반영하여 다수의 기능이 개선되었다. ▲새롭게 디자인된 대시보드는 중요한 정보와 작업에 대한 접근성을 높였으며, ▲업데이트된 카메라 그리드를 통해 모니터링 기능이 강화되었다. 또한 ▲지도 편집 기능이 확장되어 더욱 정밀한 경로 설정이 가능하며, ▲다국어 지원이 추가되어 글로벌 환경에서도 손쉽게 활용할 수 있다. 이 같은 개선 사항들은 보다 편리한 로봇 제어 환경을 제공하는 데 초점을 맞추었다.
다양한 운영체제 지원 및 확장성
‘플래너 V4’는 윈도우, macOS, 리눅스, 안드로이드(태블릿) 등 다양한 운영체제를 지원하며, 다양한 기기에서 활용할 수 있다. 이를 통해 사용자는 특정 하드웨어 환경에 종속되지 않고 로봇을 제어할 수 있으며, 기존 시스템과의 연동도 더욱 유연하게 이뤄진다. 이러한 확장성은 산업 현장에서의 실용성을 더욱 높이는 요인으로 작용하고 있다.
도구공간은 ‘플래너 V4’를 통해 AI 자율주행 순찰로봇의 대중화를 목표로 하고 있다. 로봇을 보다 쉽게 활용할 수 있도록 지속적인 소프트웨어 업그레이드를 진행하고 있으며, 사용자의 요구에 맞춘 기능 개선을 이어갈 계획이다. 관계자는 “플래너는 로봇 관리의 효율성을 극대화하는 혁신적인 도구”라며, “앞으로도 AI 기반 로봇 기술을 더욱 발전시켜 스마트한 자동화 환경을 제공할 것”이라고 밝혔다.
이번 ‘플래너 V4’ 출시는 AI 자율주행 로봇 시장의 진입 장벽을 낮추고, 보다 넓은 산업 분야에서 로봇 기술이 활용될 수 있는 기반을 마련하는 중요한 전환점이 될 것으로 기대된다.
관련기사
- AI 자율주행 순찰로봇, 병원 약제 및 검체 이송도 척척
- 도구공간-현대건설, 스마트시티 순찰로봇 실증사업 성공적 완료
- 다쏘시스템-쿠카, 산업용 로봇 개발 협력
- 역사적인 상업용 로봇 달 착륙 임박
- 멀티 태스킹 가능한 ‘산업용 휴머노이드 로봇’...15Kg 소포 작업 및 SPS 분류도 거뜬
- 에이전트끼리 협력하는 ‘군집 지능’...연평균 성장률 34%로 괄목상대 성장세
- ‘AI 자율제조’로 진화하는 스마트 제조와 스마트 팩토리
- 휴머노이드 로봇 훈련소...맞춤형 실전 훈련으로 대규모 로봇 개발
- 펀팩-살린, 전시·컨벤션 다국어 지원 AI 안내 서비스 협력
- AI 순찰로봇 관제 시스템 'SOS V3' 출시, 스마트 보안 관제 강화
- AI 기반 UX 분석 자동화로 디지털 제품 테스트 비용·시간↓
- 산업 현장 로봇 함대 ‘실시간 통합관리’ 플랫폼...AI 기반 플랫폼으로 운영 효율성과 ROI 극대화
- 도구공간, 인피니언 글로벌 협력 프로그램 파트너 선정
- 도구공간-레인보우로보틱스, ‘사족보행 AI 자율주행 순찰로봇 솔루션’ 공동 개발 협력